इस पोस्ट में हम यह जानने जा रहे हैं कि सर्वो मोटर क्या है, यह कैसे कार्य करती है, माइक्रोकंट्रोलर के साथ कैसे इंटरफेस करती है और इस मोटर को अन्य मोटर्स से क्या खास बनाती है।
इलेक्ट्रॉनिक्स के प्रति उत्साही होने के कारण हम कई प्रकार की मोटरों में आए होंगे, यहाँ हम एक विशेष प्रकार की मोटर पर नज़र रखने जा रहे हैं जिसे सर्वो मोटर कहा जाता है।
सर्वो मोटर क्या है?
सर्वो मोटर या बस सर्वो एक विशेष प्रकार की मोटर है जिसे स्थिति, त्वरण और वेग पर सटीक नियंत्रण के लिए डिज़ाइन किया गया है। अन्य सभी प्रकार की मोटरों के विपरीत, सर्वो केवल 180 डिग्री द्वि-दिशात्मक घुमा सकता है। इसमें यांत्रिक गियर और डाट होते हैं जो सर्वो के कोणीय घूर्णन को सीमित करते हैं।
विशिष्ट इमदादी मोटर:

सर्वो मोटर्स का उपयोग रोबोटिक्स, सीसीटीवी कैमरों, आरसी कारों, नावों, खिलौना विमान आदि में किया जाता है। सर्वोस का उपयोग किया जाता है, जहाँ हमें ज़रूरत नहीं है कि हम घूर्णी गति जारी रखें, लेकिन एक विशिष्ट स्थिति में लॉक करें या जंगम कोण सीमा के भीतर नियंत्रित वेग के साथ कुछ भार ले जाएँ।
सर्वो अन्य प्रकारों की तरह केवल एक मोटर नहीं है, लेकिन यह मॉड्यूल है, जो एक सामान्य डीसी / एसी मोटर, गियर का एक समूह, नियंत्रण इलेक्ट्रॉनिक्स और एक फीडबैक सिस्टम को जोड़ती है। आइए प्रत्येक उल्लिखित चरणों को विस्तार से देखें।
डीसी / एसी मोटर जो एक सर्वो मॉड्यूल पर नियोजित की जाती है, ब्रश रहित या ब्रश मोटर हो सकती है, अधिकांश शौक में डीसी मोटर का उपयोग किया जाता है और एसी मोटर का उपयोग औद्योगिक अनुप्रयोगों में किया जाता है। मोटर सर्वो को घूर्णी इनपुट देता है। इमदादी के अंदर मोटर कई सौ RPM पर घूमती है और आउटपुट रोटेशन इसके RPM से लगभग 50 या अधिक गुना कम होता है।
अगला चरण गियर असेंबली है, जो कोणीय रोटेशन और सर्वो की गति को नियंत्रित करता है। गियर या तो प्लास्टिक या धातु से बनाया जा सकता है जो इस बात पर निर्भर करता है कि भार कितना भारी है। आम तौर पर डीसी मोटर्स को उच्च आरपीएम और कम टॉर्क पर चलाया जाता है और गियर असेंबली आरपीएम को टॉर्क में बदल देती है। इस प्रकार एक छोटी मोटर एक बड़ा भार संभाल सकती है।
अगला चरण नियंत्रण इलेक्ट्रॉनिक्स है जो मोटर के रोटेशन को नियंत्रित करने के लिए MOSFETs और IC का गठन करता है। एक प्रतिक्रिया प्रणाली हमेशा इम्यूलेटर की वर्तमान स्थिति को ट्रैक करने के लिए सर्वो मोटर्स में मौजूद होती है।
सर्वोस में आमतौर पर एक प्रतिक्रिया घटक एक पोटेंशियोमीटर होता है, जो सीधे घूर्णन एक्ट्यूएटर से जुड़ा होता है। पोटेंशियोमीटर वोल्टेज डिवाइडर के रूप में कार्य करता है जिसे कंट्रोल इलेक्ट्रॉनिक्स को खिलाया जाता है। यह प्रतिक्रिया मोटर को दी जाने वाली शक्ति की मात्रा निर्धारित करने के लिए इलेक्ट्रॉनिक्स को नियंत्रित करने में मदद करती है।
यदि कोई बाहरी बल गड़बड़ी करने की कोशिश करता है तो एक स्थिर स्थिति में एक सर्वो मोटर अपनी वर्तमान स्थिति से हट जाएगा। प्रतिक्रिया प्रणाली वर्तमान स्थिति की निगरानी करती है और बाहरी गड़बड़ी के खिलाफ मोटर को शक्ति प्रदान करती है।
उपरोक्त परिदृश्य समान है जब सर्वो अपने एक्ट्यूएटर को आगे बढ़ा रहा है। नियंत्रण प्रणाली बाहरी बल की भरपाई करेगी और निर्धारित वेग में चलेगी।
अब तक आप इमदादी मोटर और इसकी कार्यप्रणाली के बारे में काफी कुछ जानते हैं। आइए देखें कि माइक्रोकंट्रोलर का उपयोग करके सर्वो मोटर्स को कैसे नियंत्रित किया जाए।
इमदादी मोटर्स में अन्य मोटर्स के विपरीत 3 टर्मिनल होते हैं जिनमें 2 टर्मिनल, आपूर्ति के लिए दो (5 वी नाममात्र) और एक नियंत्रण संकेत के लिए होता है। टर्मिनलों की आसान पहचान के लिए तारों को रंगीन किया जाता है।
50Hz आवृत्ति पर सर्वो के नियंत्रण संकेत PWM हैं। सिग्नल की पल्स चौड़ाई एक्ट्यूएटर आर्म की स्थिति निर्धारित करती है। एक विशिष्ट हॉबी सर्वो मोटर 1 से 2 मिलीसेकंड पल्स चौड़ाई से संचालित होती है।
1 एमएस पल्स चौड़ाई कंट्रोल सिग्नल लगाने से एक्ट्यूएटर 0 डिग्री की स्थिति में रहेगा। 2 एमएस पल्स चौड़ाई कंट्रोल सिग्नल लगाने से एक्ट्यूएटर 180 डिग्री की स्थिति में रहेगा। 1-2 एमएस के बीच सिग्नल लगाने से एक्ट्यूएटर 0-180 डिग्री के कोण पर रहेगा। इसे नीचे दी गई छवि द्वारा बेहतर ढंग से समझा जा सकता है।

अब तक आप समझ गए होंगे कि एक इमदादी पल्स चौड़ाई मॉडुलन (PWM) द्वारा कैसे नियंत्रित किया जाता है।
अब आइए सीखते हैं कि Arduino के साथ सर्वो मोटर को कैसे इंटरफ़ेस करें।
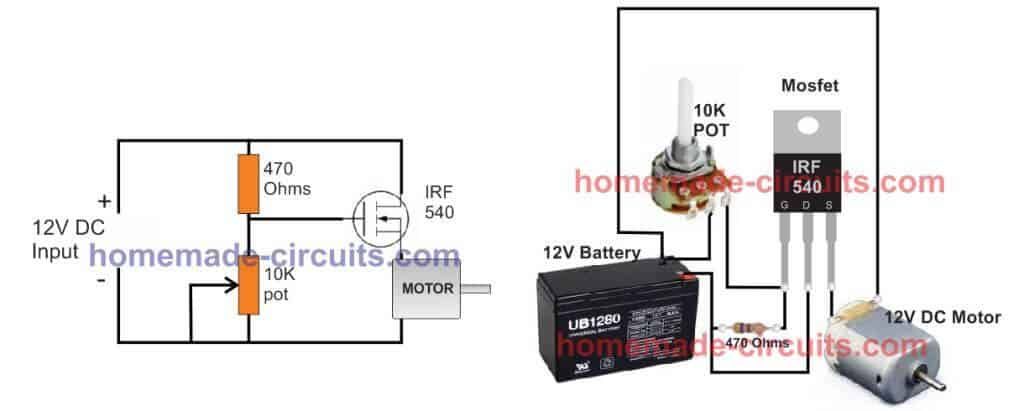
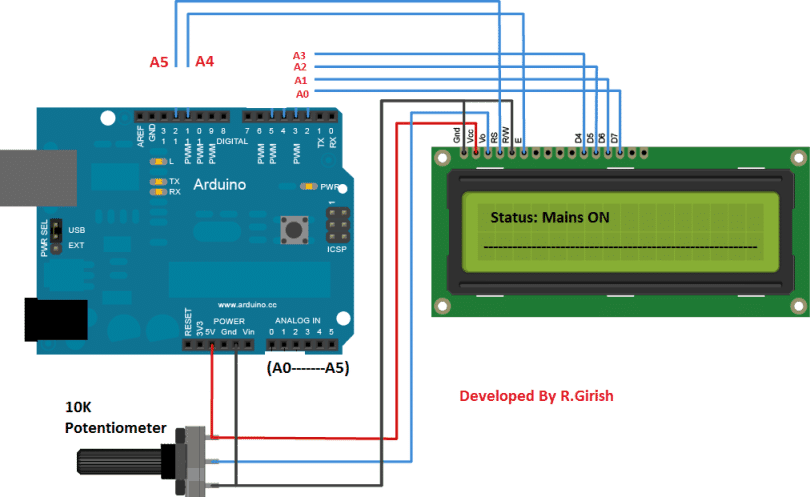
सर्किट आरेख:

वायरिंग आसान और आत्म-व्याख्यात्मक है। यदि आपको भारी सर्वो मोटर का उपयोग करना है तो आपको बाहरी बिजली की आपूर्ति की आवश्यकता है। अगर आप arduino पॉवर की सप्लाई से बिजली लेने की कोशिश करते हैं तो आप कंप्यूटर पर USB पोर्ट को ओवरलोड कर देंगे।
यदि आपके पास सर्वो समान है जिसे लेख की शुरुआत में चित्रित किया गया है, तो आप इसे arduino 5V आपूर्ति से शक्ति दे सकते हैं, जिसे लेखक के प्रोटोटाइप में भी दिखाया गया है।
लेखक का प्रोटोटाइप:

Arduino को इसे संभालने के लिए सर्वो लाइब्रेरी की आवश्यकता है, इसने हमारा काम आसान कर दिया है और यह Arduino IDE में पहले से ही मौजूद है।
कार्यक्रम:
//--------Program developed by R.Girish--------//
#include
Servo motor
int pos = 0
int t=10
void setup()
{
motor.attach(7)
}
void loop()
{
A:
pos=pos+1
motor.write(pos)
delay(t)
if(pos==180) { goto B}
goto A
B:
pos=pos-1
motor.write(pos)
delay(t)
if(pos==0) { goto A}
goto B
}
//--------Program developed by R.Girish--------//
उपरोक्त कार्यक्रम एक्ट्यूएटर को 0 से 180 डिग्री दाएं और 180 से 0 डिग्री बाएं और चक्र दोहराता है। यह सर्वो परीक्षण के लिए एक सरल कार्यक्रम है जिसे आपको अपने अनुकूलित अनुप्रयोगों के लिए अपना कोड लिखने की आवश्यकता हो सकती है।
की एक जोड़ी: दो पाइप पानी पंप वाल्व नियंत्रक सर्किट अगला: मोटरसाइकिल वोल्टेज नियामक तारों को समझना