
सेवा मेरे रोबोट एक इलेक्ट्रो-मैकेनिकल मशीन है यह एक सर्किटरी या एक कंप्यूटर प्रोग्राम द्वारा निर्देशित है। रोबोट्स ने निरंतर और खतरनाक कार्यों को करने में सहायता के लिए मनुष्यों का आदान-प्रदान किया है जो मनुष्य नहीं करने के लिए चुनते हैं। वर्तमान रोबोट को विभिन्न श्रेणियों में वर्गीकृत किया गया है उनकी विशेषताओं और औद्योगिक रोबोट, वाणिज्यिक रोबोट, सेवा रोबोट, मोबाइल रोबोट जैसे प्रदर्शन के आधार पर। यहाँ एक सर्विस रोबोट है जो रिकॉर्ड आवाज संदेश के माध्यम से 'नमस्ते' का प्रतिनिधित्व करते हुए हाथ आंदोलन द्वारा लोगों का स्वागत करने के लिए निरंतर कार्य करता है। आम तौर पर, जब हम लोगों को घर, पार्टियों, शादी के कार्यों, कार्यालय आदि के लिए आमंत्रित करते हैं, तो हमें प्रवेश पर उन्हें बधाई देने और आमंत्रित करने के लिए एक व्यक्ति की व्यवस्था करने की आवश्यकता होती है। यदि लोगों की राशि कम है, तो कार्य सरल है। लेकिन अगर आप सैकड़ों लोगों को नमस्कार करते हैं, तो कार्य कठिन है। इस समस्या को दूर करने के लिए, यहाँ एक परियोजना है, जिसका नाम है वॉयस कंट्रोल वाला नमस्ते रोबोट।

Namaste Robot
वॉयस कंट्रोल के साथ नमस्ते रोबोट
इस नमस्ते की मुख्य अवधारणा रोबोट परियोजना विभिन्न सर्वो मोटर्स को नियंत्रित करने के लिए है एक Arduino बोर्ड के माध्यम से। यह रोबोट आसपास के लोगों को स्कैन करता है और अपने सिर को 180 ° से घुमाता है। यदि यह किसी को भी पास में पहचानता है, तो यह उस व्यक्ति को नमस्ते के साथ दोनों हाथों से एक साथ दबाने की इच्छा करता है। यह भारत में लोगों को शुभकामना देने का पारंपरिक तरीका है। रोबोट के अनुप्रयोग लोगों को आकर्षित करने के लिए शॉपिंग मॉल, पार्क, कार्यालयों में शामिल।
आवाज नियंत्रण के साथ Namastae रोबोट के ब्लॉक आरेख
निम्न आंकड़ा आवाज नियंत्रित के साथ नमस्ते रोबोट के ब्लॉक आरेख को दर्शाता है। इस तरह के रोबोट में वॉयस कमांड को प्रोग्राम किया जाता है। संपूर्ण विकास बोर्ड को आम बिजली आपूर्ति से जोड़ा जा सकता है। प्रत्येक ब्लॉक का विवरण निम्नानुसार है। बिजली की आपूर्ति सभी मॉड्यूल को बिजली की आपूर्ति देता है। इन मॉड्यूल को mA में करंट की आवश्यकता होती है और ऑपरेटिंग वोल्टेज 5V होगा।

आवाज नियंत्रण के साथ Namastae रोबोट के ब्लॉक आरेख
Arduino बोर्ड
Arduino एक तरह का टूल है एक साधारण माइक्रोकंट्रोलर बोर्ड पर आधारित है जिसका उपयोग डेस्कटॉप कंप्यूटर की तुलना में भौतिक दुनिया को नियंत्रित करने और महसूस करने के लिए किया जाता है। भौतिक कंप्यूटिंग के लिए विभिन्न माइक्रोकंट्रोलर प्लेटफॉर्म उपलब्ध हैं। एक Arduino की महत्वपूर्ण विशेषताएं सस्ती, खुला स्रोत और एक्स्टेंसिबल सॉफ़्टवेयर हैं। Arduino सॉफ़्टवेयर खुले स्रोत उपकरण के रूप में उपलब्ध है और भाषा को C ++ पुस्तकालयों के माध्यम से बढ़ाया जा सकता है।

Arduino बोर्ड
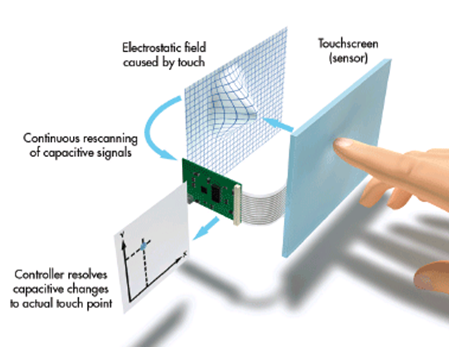
पिंग सेंसर
पिंग सेंसर अपने आसपास के क्षेत्र में किसी वस्तु की दूरी को नियंत्रित करने के लिए सोनार का उपयोग करता है। इस सेंसर का उपयोग किया जाता है बाधा महसूस करने के लिए रोबोट की आंखें। उदाहरण के लिए, निकटता सेंसर। यह एक उत्कृष्ट रेंज सटीकता और स्थिर रीडिंग देता है। इस सेंसर का संचालन काली सामग्री या सूर्य के प्रकाश से प्रभावित नहीं होता है। पिंग सेंसर के विनिर्देशों वोल्टेज 5V है, वर्तमान 15mA है, सेंसर कोण नहीं है = = 15 और पता लगाने की दूरी 2 सेमी ~ 450 सेमी है।

पिंग सेंसर
एक Arduino के साथ पिंग सेंसर का इंटरफेस नीचे दिखाया गया है। वहाँ चार पिन इंटरफेस के लिए उपलब्ध हैं वह एक Arduino बोर्ड के साथ सेंसर पिंग है। Arduino बोर्ड पर चार पिन GND, VCC, ECHO और TRIGGER हैं। बोर्ड पर पिन D0-D13 हैं, जिसमें 12 और 13 पिन इनपुट और आउटपुट पिन हैं।
Arduino माइक्रोकंट्रोलर हमें एक सर्वो कंट्रोल लाइब्रेरी प्रदान करता है जो हमें आसानी से सर्वो स्विच करने देता है। इस परियोजना में हमने नमस्ते, रोबोट, जैसे कि सिर, दाहिनी कोहनी, बाएं कोहनी, दाएं कंधे और बाएं कंधे के आंदोलनों को विनियमित करने के लिए 5 सर्वोस का उपयोग किया। इधर, Arduino बोर्ड में डिजिटल इनपुट / आउटपुट पिन (D5, D6, D9, D10, D1) पिंस, सर्वो मोटर्स के लिए हस्तक्षेप करते हैं।
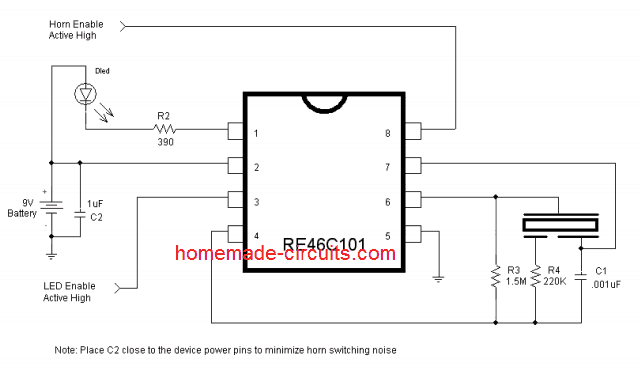
वॉयस प्लेबैक आईसी
यह वॉइस प्लेबैक आईसी रिकॉर्डेड संदेश प्रदान करता है जो पूर्वनिर्धारित आवृत्ति दर पर खेलता है। प्लेबैक को ऑडियो प्रवर्धन इकाई में ले जाया जाता है।

वॉयस प्लेबैक आईसी
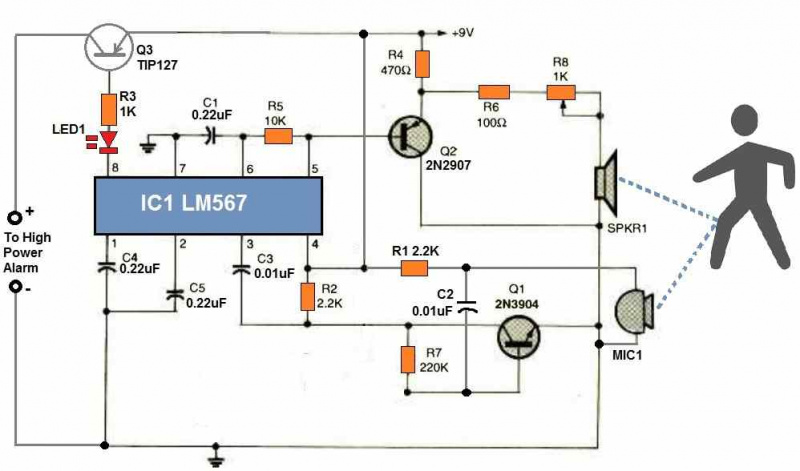
रिले
सेवा मेरे रिले एक प्रकार का स्विच है विद्युत संचालित करता है। रिले के कॉइल के माध्यम से धारा का प्रवाह एक चुंबकीय क्षेत्र बनाता है जो लीवर को आमंत्रित करता है और स्विच संपर्कों को बदलता है।

रिले
आवाज नियंत्रण Namastae रोबोट कार्य करना
नमस्ते रोबोट का काम एक चरण में चरणबद्ध प्रक्रिया के साथ-साथ सिम्युलेटेड परिणामों के साथ किया जा सकता है। जब नमस्ते रोबोट पहले राज्य में होता है, तब सर्वो मोटर रोबोट के 2, 3, 4, 5 बंद राज्य या शून्य स्थिति में हैं। नमस्ते रोबोट का सिर 0 ° -180 ° से सर्वो मोटर 1 के स्पिन के कारण केंद्र से दाएं, बाएं और फिर वापस केंद्र की ओर बढ़ता है। रोबोट के सिर की गति निर्दिष्ट करती है कि नमस्ते रोबोट एक बाधा की तलाश कर रहा है। जब पिंग सेंसर किसी भी बाधा का पता लगाता है, तो रोबोट की सिर की स्थिति केंद्र में वापस आ जाती है और सर्वो मोटर 1 में 90 ° कोण पर आ जाता है और स्विच ऑफ हो जाता है। यह एक कम अवस्था में सक्रिय होता है।
जब इमदादी मोटर 1 को बंद कर दिया जाता है तो शेष मोटर जैसे इमदादी 4 और सर्वो 5 स्विच ऑन हो जाते हैं। नमस्ते रोबोट के दाएं और बाएं कंधों के लिए सिग्नल लाइन चालू हो जाती है। अब एक रोबोट के हाथ आंदोलन कर सकते हैं। कंधे इमदादी मोटर्स को Arduino बोर्ड के डिजिटल इनपुट और आउटपुट पिंस में हस्तक्षेप किया जाता है। लेकिन, सिग्नल लाइनें या ये पिन अधिक होंगे और सर्वो की स्थिति को 90 ° तक बदल दिया जाएगा। अब सर्वो 4 और सर्वो 5 बंद हो गए।
अंत में हम यह निष्कर्ष निकाल सकते हैं कि, इस ध्वनि नियंत्रण का मुख्य उद्देश्य रोबोट सेवा प्रदान करना है इसके सामने चलने वाले लोगों का पता लगाकर लोगों का विनम्रता से स्वागत करना। इसका उपयोग विभिन्न सार्वजनिक स्थानों जैसे पार्क, शॉपिंग मॉल, पार्टियों आदि में किया जा सकता है। हमें उम्मीद है कि आपको इस अवधारणा की बेहतर समझ हो गई होगी। इसके अलावा, इस अवधारणा या arduino आधारित के बारे में कोई प्रश्न रोबोट परियोजनाओं , कृपया नीचे टिप्पणी अनुभाग में टिप्पणी करके अपने बहुमूल्य सुझाव दें।
फ़ोटो क्रेडिट:
- Arduino बोर्ड nyacknewsandviews
- पिंग सेंसर लंबन
- वॉयस प्लेबैक आईसी कीलाब
- रिले अवाक्
- Namaste Robot Canstockphoto







{kind=link}
{kind=link}
{kind=link}
{kind=link}