बोडे प्लॉट और निक्विस्ट प्लॉट बहुत लोकप्रिय प्लॉट हैं, खासकर इलेक्ट्रोकेमिकल इम्पीडेंस स्पेक्ट्रोस्कोपी या इलेक्ट्रोकैमिस्ट्स के बीच ईआईएस डेटा के लिए। तो, Nyquist प्लॉट का नाम एक स्वीडिश-अमेरिकी नाम 'हैरी Nyquist' के नाम पर रखा गया है। वह एक इलेक्ट्रिक इंजीनियर हैं और उन्होंने इस प्लॉट को इलेक्ट्रॉनिक्स उद्देश्यों के लिए वर्ष 1932 में विकसित किया था। ईआईएस के दौरान, बहुत सारी जानकारी एकत्र की जाती है और इस एकत्रित जानकारी को प्रस्तुत करने की आवश्यकता होती है। इसलिए एक तस्वीर सौ शब्दों से ज्यादा जानकारी देती है। तो एक विद्युत रासायनिक प्रतिबाधा स्पेक्ट्रोस्कोपी दिखाने के लिए एक Nyquist प्लॉट की तरह एक ग्राफिकल प्रतिनिधित्व का उपयोग किया जाता है। यह लेख जानकारी प्रदान करता है न्यक्विस्ट प्लॉट - काम, फायदे और इसके नुकसान।
Nyquist प्लॉट परिभाषा
ग्राफिकल प्रतिनिधित्व जो व्यापक रूप से स्थानांतरण कार्यों के लिए उपयोग किया जाता है, उसे Nyquist प्लॉट के रूप में जाना जाता है। यह एक आवृत्ति प्रतिक्रिया प्लॉट है जिसका उपयोग फीडबैक स्थिरता के साथ नियंत्रण प्रणाली का आकलन करने के लिए किया जाता है। यह जटिल विमान के भीतर स्थानांतरण फ़ंक्शन के वास्तविक और काल्पनिक भाग के लिए एक पैरामीट्रिक प्लॉट है क्योंकि फ़्रीक्वेंसी पैरामीटर एक निर्दिष्ट अंतराल में स्वीप करता है। कार्टेशियन निर्देशांक में, नाइक्विस्ट प्लॉट ट्रांसफर फ़ंक्शन का वास्तविक भाग एक्स-अक्ष पर प्लॉट किया जाता है जबकि ट्रांसफर फ़ंक्शन का काल्पनिक भाग वाई-अक्ष पर प्लॉट किया जाता है।
Nyquist प्लॉट का उपयोग स्वचालित नियंत्रण के साथ-साथ स्थिरता के विश्लेषण के लिए सिग्नल प्रोसेसिंग में किया जाता है क्योंकि कोई भी तुरंत सत्यापित कर सकता है कि नकारात्मक प्रतिक्रिया वाला लूप Nyquist के स्थिरता सिद्धांत को पूरा करता है या नहीं। यदि Nyquist की साजिश ओपन लूप कंट्रोल सिस्टम वास्तविक धुरी पर लगभग बिंदु को कवर करता है बाद में समतुल्य बंद लूप सिस्टम अस्थिर होता है।
Nyquist प्लॉट ग्राफ
Nyquist प्लॉट ग्राफ़ मुख्य रूप से खोजने के लिए उपयोग किए जाने वाले ध्रुवीय भूखंडों का विस्तार है बंद लूप नियंत्रण प्रणाली स्थिरता केवल 'ω' को -∞ से ∞ में बदलकर। इसका मतलब है कि, इन भूखंडों का उपयोग ज्यादातर ओपन-लूप ट्रांसफर फ़ंक्शन की कुल आवृत्ति प्रतिक्रिया को चित्रित करने के लिए किया जाता है। Nyquist प्लॉट केवल प्रतिक्रिया के साथ नियंत्रण प्रणाली की स्थिरता का मूल्यांकन करता है। तो, एक कार्टेशियन समन्वय प्रणाली में, स्थानांतरण फ़ंक्शन का वास्तविक सममूल्य केवल एक्स-अक्ष पर प्लॉट किया जाता है जबकि काल्पनिक भाग केवल वाई-अक्ष पर प्लॉट किया जाता है।
समान Nyquist प्लॉट को केवल ध्रुवीय निर्देशांक के साथ समझाया जा सकता है, जहां स्थानांतरण फ़ंक्शन का लाभ रेडियल समन्वय है, और स्थानांतरण फ़ंक्शन का चरण समतुल्य कोणीय समन्वय है।
उपयोग की जाने वाली कुछ शब्दावली को जानकर Nyquist प्लॉट को समझा जा सकता है। Nyquist प्लॉट में, एक जटिल तल के भीतर एक बंद पथ को कंटूर के रूप में जाना जाता है।
निक्विस्ट पथ
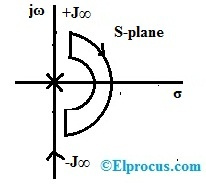
Nyquist पथ या Nyquist कंटूर s-प्लेन के भीतर एक बंद समोच्च है जो s-प्लेन के पूर्ण दाहिने हाथ को घेरता है। विमान के कुल आरएचएस को घेरने के लिए, 'jω' अक्ष और स्रोत पर केंद्र के साथ एक व्यास द्वारा एक बड़ा अर्धवृत्त लेन खींचा जाता है। अर्धवृत्त त्रिज्या को केवल Nyquist Encirclement के रूप में माना जाता है।

Nyquist घेरना
एक बिंदु को एक रेखा से घिरा हुआ माना जाता है यदि यह वक्र में पाया जाता है।
निक्विस्ट मैपिंग
वह प्रक्रिया जिसके द्वारा एस-प्लेन के भीतर एक बिंदु को एफ (एस) प्लेन के भीतर एक बिंदु में बदल दिया जाता है, मैपिंग के रूप में जाना जाता है और एफ (एस) को मैपिंग के कार्य के रूप में जाना जाता है।
प्रतिक्रिया नियंत्रण प्रणाली का स्थिरता विश्लेषण मुख्य रूप से एस-प्लेन के ऊपर विशेषता समीकरण के लिए स्थान की जड़ों को पहचानने पर निर्भर करता है।
इस प्रकार, यदि एस-प्लेन पर रूट बाएं चेहरे पर स्थित है तो नियंत्रण प्रणाली स्थिर है। तो, सिस्टम की सापेक्ष स्थिरता को विभिन्न आवृत्ति प्रतिक्रिया तकनीकों के माध्यम से निर्धारित किया जा सकता है जैसे कि निक्विस्ट प्लॉट, बोड प्लॉट और निकोल्स प्लॉट।
Nyquist स्थिरता मानदंड
Nyquist स्थिरता मानदंड मुख्य रूप से एस-प्लेन के विशेष क्षेत्र में एक विशिष्ट समीकरण के लिए जड़ों के अस्तित्व को पहचानने के लिए उपयोग किया जाता है। Nyquist स्थिरता मानदंड जैसे N = Z – P बस यही कहता है। 'एन' उत्पत्ति के संबंध में घेरे की कुल संख्या है, 'पी' ध्रुवों की संख्या है और 'जेड' शून्य की कुल संख्या है।
केस 1 में: जब N = 0 (कोई घेरा नहीं), तो Z = P = 0 और Z = P।
यदि N = 0, P को '0' होना चाहिए तो सिस्टम स्थिर है।
स्थिति 2 में: जब N 0 से बड़ा हो (घड़ी की दिशा में घेरा), तो P = 0, Z ≠ 0 और Z > P
इन दोनों मामलों में सिस्टम अस्थिर है।
स्थिति 3 में: जब N 0 से कम हो (वामावर्त घेरा), इस प्रकार Z = 0, P ≠0 और P > Z
इस प्रकार, प्रणाली स्थिर है।
Nyquist प्लॉट कैसे ड्रा करें?
निक्विस्ट प्लॉट बनाने में कई कदम शामिल हैं जिनकी चर्चा नीचे की गई है।
- चरण 1 में: 's' प्लेन के भीतर G(s)H(s) जैसे ओपन लूप ट्रांसफर फंक्शन के लिए पोल्स की जांच करने की आवश्यकता है।
- चरण 2 में: एस-प्लेन के पूरे दाहिने हिस्से को शामिल करके सही निक्विस्ट कंटूर चुनें, बस त्रिज्या 'आर' का अर्धवृत्त खींचकर जहां आर अनंत तक जाता है।
- चरण 3 में: Nyquist पथ के स्थान के साथ रूपरेखा पर विभिन्न खंडों को पहचानें।
- चरण 4 में: मैपिंग फ़ंक्शन में संबंधित सेगमेंट समीकरण को बस प्रतिस्थापित करके मैपिंग सेगमेंट को सेगमेंट के माध्यम से प्रदर्शन करने की आवश्यकता होती है। आम तौर पर, हमें विशेष खंड के लिए ध्रुवीय भूखंडों को बनाना होता है।
- चरण 5 में: आम तौर पर, खंड मानचित्रण सकारात्मक काल्पनिक अक्ष के विशेष पथ के लिए मानचित्रण की छवियों को दर्शाता है।
- चरण 6 में: अर्धवृत्ताकार लेन जो विमान के दाहिने आधे हिस्से को कवर करती है, सामान्य रूप से जी (एस) एच (एस) विमान के भीतर एक बिंदु में मैप करती है।
- चरण 7 में: आवश्यक निक्विस्ट आरेख प्राप्त करने के लिए सभी विभिन्न मानचित्रण खंडों को आपस में जोड़ दें।
- चरण 8 में: संख्या नोट करें। (-1, 0) के बारे में दक्षिणावर्त घेरे और N = Z - P के माध्यम से स्थिरता तय करें।
एक बार Nyquist प्लॉट तैयार हो जाने के बाद, हम Nyquist स्थिरता मानदंड के साथ बंद-लूप नियंत्रण प्रणाली की स्थिरता की खोज कर सकते हैं। इसलिए, यदि महत्वपूर्ण बिंदु (-1+j0) घेरे के बाहर स्थित है, तो बंद लूप नियंत्रण प्रणाली पूरी तरह से स्थिर है।
ओपन लूप ट्रांसफर फ़ंक्शन G(S)H(S) = N(S)/D(S) है।
बंद-लूप ट्रांसफर फ़ंक्शन G(S)/1+ G(S)H(S) है।
N(s) = ज़ीरो ओपन लूप ज़ीरो है और D(s) ओपन लूप पोल है।
स्थिरता के दृष्टिकोण से, एस-प्लेन के आरएच चेहरे पर कोई बंद लूप पोल नहीं होना चाहिए। विशेषता समीकरण जैसे 1 + G(s) H(s) शून्य के बराबर बंद-लूप ध्रुवों को दर्शाता है।
जब 1 + G(s) H(s) शून्य के बराबर है तो q(s) शून्य होना चाहिए।
इसलिए, स्थिरता के दृष्टिकोण से, q(s) के शून्य को s-विमान के दाहिने हाथ के तल के भीतर नहीं होना चाहिए।
ताकत का वर्णन करने के लिए, पूरे आरएचपी पर विचार करने की जरूरत है। तो हम एक अर्धवृत्त की कल्पना करते हैं जिसमें अर्धवृत्त त्रिज्या 'आर' पर विचार करके आरएचपी के भीतर सभी बिंदु शामिल हैं जो अनंत तक जाता है।
Nyquist प्लॉट के साथ स्थिरता विश्लेषण
Nyquist प्लॉट से, हम यह पहचान सकते हैं कि पैरामीटर मानों के आधार पर नियंत्रण प्रणाली स्थिर, अस्थिर या मामूली रूप से स्थिर है या नहीं।
- क्रॉस-ओवर फ़्रीक्वेंसी और फ़ेज़ क्रॉस-ओवर फ़्रीक्वेंसी प्राप्त करें।
- लाभ मार्जिन और चरण मार्जिन।
चरण क्रॉस-ओवर फ्रीक्वेंसी।
जिस आवृत्ति पर Nyquist प्लॉट नकारात्मक वास्तविक अक्ष से मिलता है, उसे चरण क्रॉस-ओवर फ़्रीक्वेंसी कहा जाता है और इसे ωpc से दर्शाया जाता है।
गेन क्रॉस ओवर फ्रीक्वेंसी
जिस आवृत्ति पर Nyquist प्लॉट में एक परिमाण होता है, उसे गेन क्रॉस-ओवर फ़्रीक्वेंसी कहा जाता है और इसे ωgc से निरूपित किया जाता है।
चरण क्रॉस-ओवर के साथ-साथ गेन क्रॉस ओवर जैसी दो आवृत्तियों के बीच मुख्य संबंध के आधार पर नियंत्रण प्रणाली स्थिरता की चर्चा नीचे की गई है।
- यदि ωpc ωgc की तुलना में अधिक है तो नियंत्रण प्रणाली स्थिर है।
- यदि ωpc ωgc के समतुल्य है तो नियंत्रण प्रणाली थोड़ी स्थिर है।
- यदि ωpc ωgc की तुलना में कम है तो नियंत्रण प्रणाली स्थिर नहीं है।
लाभ मार्जिन
लाभ मार्जिन चरण क्रॉस-ओवर आवृत्ति पर Nyquist प्लॉट के परिमाण के व्युत्क्रम के बराबर है।
लाभ मार्जिन (जीएम) = 1/एमपीसी
जहां 'एमपीसी' ωpc या चरण क्रॉस-ओवर आवृत्ति पर सामान्य पैमाने के भीतर परिमाण है
चरण मार्जिन
फेज मार्जिन 180 डिग्री और ωgc पर फेज कोण या गेन क्रॉस-ओवर फ्रीक्वेंसी के योग के बराबर है।
पीएम = 1800 + ϕgc
जहां ϕgc गेन क्रॉस-ओवर फ्रीक्वेंसी (ωgc) पर फेज कोण है।
नियंत्रण प्रणाली की स्थिरता नीचे दिए गए लाभ मार्जिन और चरण मार्जिन जैसे दो मार्जिन के बीच मुख्य संबंध पर निर्भर करती है।
यदि लाभ मार्जिन एक से अधिक है और चरण मार्जिन सकारात्मक है, तो नियंत्रण प्रणाली स्थिर है।
यदि लाभ मार्जिन एक के बराबर है और चरण मार्जिन '0'डिग्री है, तो नियंत्रण प्रणाली थोड़ी स्थिर है।
यदि लाभ मार्जिन एक से कम है और चरण मार्जिन नकारात्मक है, तो नियंत्रण प्रणाली स्थिर नहीं है।
Nyquist प्लॉट उदाहरण समस्याएं
पूर्व 1: यदि Nyquist प्लॉट नेगेटिव रियल एक्सिस को 0.6 दूरी पर काटता है तो सिस्टम गेन मार्जिन क्या है?
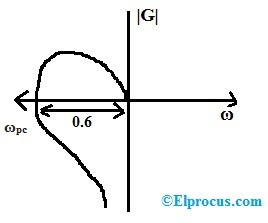
हम जानते हैं कि सिस्टम के गेन मार्जिन को एक बंद लूप सिस्टम को अस्थिर बनाने के लिए ओपन लूप गेन के भीतर आवश्यक परिवर्तन की मात्रा के रूप में परिभाषित किया जा सकता है।
लाभ मार्जिन या जीएम = 1/|जी| wpc
जहां, सिस्टम का लाभ है |जी| और डब्ल्यूपीसी चरण क्रॉसओवर आवृत्ति है।
चरण क्रॉसओवर आवृत्ति को इस प्रकार परिभाषित किया जा सकता है; आवृत्ति जिस बिंदु पर सिस्टम लाभ '0' है।
ग्राम = 1/0.6 = 1.66
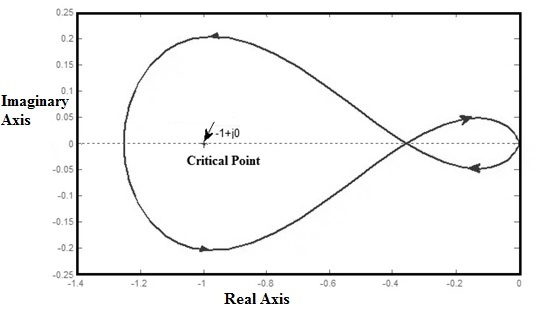
Ex2: यूनिटी गेन नेगेटिव फीडबैक सिस्टम का ओपन लूप सिस्टम ट्रांसफर फंक्शन G(s) = 1/S(S+1) के रूप में दिया जा सकता है। एस-प्लेन के भीतर नाइक्विस्ट कर्व में संपूर्ण दायीं ओर का प्लेन और बाईं ओर मूल के आसपास का छोटा क्षेत्र शामिल है, जो निम्नलिखित ग्राफ में दिखाया गया है। नहीं। G(S) Nyquist प्लॉट के माध्यम से (-1+ j0) बिंदु के घेरे, Nyquist समोच्च के समतुल्य जिसे 'N' के रूप में इंगित किया गया है तो 'N' के बराबर है?
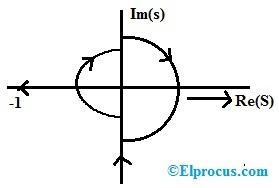
नहीं। (-1+ j0) महत्वपूर्ण बिंदु के लिए घेरों की संख्या N = P-Z के माध्यम से दी गई है।
जहां 'एन' वामावर्त दिशा में इस महत्वपूर्ण बिंदु के घेरे की संख्या है।
'पी' एस-प्लेन के दाईं ओर खुले लूप पोल की संख्या है।
'Z' एस-प्लेन के दाईं ओर बंद लूप पोल की संख्या है।
N = P स्थिरता Z = 0 के लिए।
ऊपर दिया गया सूत्र केवल तभी मान्य होता है जब Nyquist वक्र को S-प्लेन के दाईं ओर परिभाषित किया जाता है और ध्रुवों को स्रोत से बाहर कर दिया जाता है। वक्र घुमाव दक्षिणावर्त होना चाहिए और महत्वपूर्ण बिंदु का घेरा वामावर्त दिशा में है।
जी(एस) = 1/एस(एस+1).
ओपन-लूप पोल S = 0,-1 पर मौजूद हैं
बंद लूप का ट्रांसफर फंक्शन = 1/S^2+S+1
दाहिनी ओर बंद खंभे की संख्या शून्य है।
लेकिन Nyquist समोच्च को एस-प्लेन के कुल आधे हिस्से के लिए परिभाषित किया गया है और इसमें मूल पर भी पोल है।
इस प्रकार, S = 0 पर ओपन-लूप पोल को S-प्लेन के दाईं ओर के पोल के रूप में माना जाता है।
एन = पी-जेड =>1-0 =>1
फायदे और नुकसान
Nyquist प्लॉट के फायदे निम्नलिखित को शामिल कीजिए।
- सिस्टम स्थिरता को निर्धारित करने में Nyquist प्लॉट एक अत्यंत सहायक उपकरण है।
- राउथ-हॉर्विट्ज़ और रूट लोकस की तुलना में इसके कई फायदे हैं क्योंकि यह केवल समय की देरी का प्रबंधन करता है।
- लेकिन, यह सबसे अधिक मददगार है क्योंकि यह हमें स्थिरता तय करने के लिए बोड प्लॉट का उपयोग करने का एक तरीका देता है।
- इसके इस्तेमाल से कंट्रोल सिस्टम स्टेबिलिटी तय की जा सकती है।
- एक ओपन-लूप ट्रांसफर फ़ंक्शन केवल इसकी आवृत्ति प्रतिक्रिया को मापकर पाया जाता है।
- समय की देरी के संदर्भ में रूट लोकस की तुलना में यह बेहतर है, जिसका अर्थ है कि Nyquist प्लॉट सिस्टम के भीतर समय की देरी का प्रबंधन कर सकता है।
- यह ओपन-लूप ट्रांसफर फ़ंक्शन की आवृत्ति प्रतिक्रिया का पता लगा सकता है।
- यह नहीं पाता है। एस-प्लेन के दाहिने चेहरे पर उपलब्ध पोल्स की संख्या।
- यह सिस्टम की सापेक्ष स्थिरता पाता है /
Nyquist प्लॉट के नुकसान निम्नलिखित को शामिल कीजिए।
- Nyquist प्लॉट कुछ कठिन गणितीय विधियों का उपयोग करता है।
- यह सिस्टम की पूरी ताकत को हल नहीं कर सकता है।
- यह एस-प्लेन के दाहिने चेहरे पर उपलब्ध ध्रुवों के बारे में सटीक जानकारी नहीं देता है।
Nyquist प्लॉट एप्लीकेशन
Nyquist प्लॉट के अनुप्रयोगों में निम्नलिखित शामिल हैं।
- Nyquist प्लॉट का उपयोग फ़्रीक्वेंसी डोमेन के भीतर ग्राफ़िकल प्रक्रिया के माध्यम से सिस्टम स्थिरता स्थापित करने के लिए किया जाता है।
- Nyquist प्लॉट या फ़्रीक्वेंसी रिस्पांस प्लॉट मुख्य रूप से कंट्रोल इंजीनियरिंग और सिग्नल प्रोसेसिंग में उपयोग किया जाता है।
- ये ध्रुवीय भूखंडों के विस्तार हैं, जिनका उपयोग बंद-लूप नियंत्रण प्रणाली की स्थिरता को खोजने के लिए किया जाता है।
- यह सिस्टम स्थिरता का निर्धारण करने में एक अत्यंत उपयोगी उपकरण है।
- न्यक्विस्ट प्लॉट का उपयोग करके, हम दो बिंदुओं (-1, 0) और उस बिंदु के बीच की दूरी की निगरानी कर सकते हैं जहां वक्र नकारात्मक वास्तविक अक्ष को पार करता है।
स्थिरता का निर्धारण करने के लिए Nyquist प्लॉट का उपयोग कैसे किया जाता है?
Nyquist प्लॉट का उपयोग केवल संख्या को देखकर स्थिरता निर्धारित की जा सकती है। बिंदु के घेरे (−1, 0)। विभिन्न प्रकार के लाभ जिस पर सिस्टम स्थिर रहेगा, वास्तविक अक्ष क्रॉसिंग को देखकर निर्धारित किया जा सकता है। यह प्लॉट ट्रांसफर फ़ंक्शन के आकार के बारे में कुछ डेटा प्रदान करता है।
सैम्पलिंग के लिए Nyquist मानदंड क्या हैं?
Nyquist मानदंड की आवश्यकता है कि नमूना आवृत्ति सिग्नल के भीतर निहित अधिकतम आवृत्ति का न्यूनतम दो गुना हो। यदि सैंपलिंग फ्रीक्वेंसी उच्चतम एनालॉग सिग्नल फ्रीक्वेंसी के दोगुने से कम है, तो अलियासिंग नामक घटना होगी।
Nyquist प्लॉट के लिए क्या प्रयोग किया जाता है?
Nyquist प्लॉट के लिए एक ओपन लूप ट्रांसफर फ़ंक्शन का उपयोग किया जाता है।
निक्विस्ट नियम क्या है?
Nyquist का नियम केवल यह बताता है कि एक आवधिक संकेत को सिग्नल के अधिकतम आवृत्ति घटक के दोगुने से ऊपर नमूना किया जाना चाहिए। वास्तव में, क्योंकि उपलब्ध समय सीमित है, एक नमूना दर इसकी आवश्यकता से कुछ अधिक है।
नॉइज़लेस के लिए निक्विस्ट बिट रेट फॉर्मूला क्या है?
Nyquist बस कहता है कि एक बैंडविड्थ 'बी' चैनल में, आप प्रत्येक सेकंड के लिए 2B ऑर्थोगोनल सिग्नल तक प्रसारित कर सकते हैं, इस प्रकार Rp ≤ 2B, जहां भी 'Rp' पल्स रेट है।
Nyquist का प्लॉट क्या दर्शाता है?
Nyquist प्लॉट ट्रांसफर फ़ंक्शन के रूप के बारे में कुछ जानकारी का प्रतिनिधित्व करता है। इसलिए, उदाहरण के लिए; यह प्लॉट संख्या के बीच भिन्नता के बारे में जानकारी देता है। स्थानांतरण फलन के ध्रुवों और शून्यों की संख्या कोण के माध्यम से जिस बिंदु पर वक्र मूल तक पहुंचता है।
इस प्रकार, यह है Nyquist प्लॉट का अवलोकन - फायदे, नुकसान और इसके अनुप्रयोग। Nyquist भूखंडों का उपयोग नियंत्रण प्रणाली के गुणों जैसे स्थिरता, चरण मार्जिन और लाभ मार्जिन के विश्लेषण के लिए किया जाता है। Nyquist प्लॉट Matlab का उपयोग कर रहा है गतिशील मॉडल के माध्यम से उत्पन्न आवृत्ति प्रतिक्रिया से संबंधित Nyquist प्लॉट ग्राफ बनाने में हमारी सहायता करता है। यहां आपके लिए एक प्रश्न है, एक बोड प्लॉट क्या है?