सर्किट डिजाइन को समझना
यदि आप पूरे स्पष्टीकरण को नहीं पढ़ना चाहते हैं, तो आप इसके बजाय इस वीडियो को देख सकते हैं:

अब हम नीचे दिए गए सर्किट आरेख को देखते हैं और सीखते हैं कि यह चीज वास्तव में कैसे काम कर रही है। हम सर्किट में निम्नलिखित मुख्य भागों को देखते हैं:

अर्डुइनो बोर्ड - यह हमारा मस्तिष्क है। यह SPWM दालों को देता है जो तय करते हैं कि हमारा सर्किट कैसे चलेगा।
IR2110 MOSFET ड्राइवर ICS (IC1 और IC2) -ये डिवाइस Arduino से मानक SPWM सिग्नल लेते हैं और बूटस्ट्रैपिंग विधि का उपयोग करके 4 एन-चैनल एच-ब्रिज MOSFETS को ठीक से स्विच करने के लिए उन्हें संगत बनाते हैं।
MOSFETS (Q1, Q2, Q3, Q4) - ये पावर स्विच हैं। वे डीसी पावर को आउटपुट पर एसी बनाने के लिए एक विशिष्ट तरीके से चालू और बंद कर देते हैं।
डायोड (1N4007) और कैपेसिटर - ये 4 MOSFETS के सही स्विचिंग के लिए ICS के बूटस्ट्रैपिंग नेटवर्क के सही काम को सक्षम करने के लिए हैं।
अन्य कैपेसिटर और रेसिस्टर्स - ये छोटे लेकिन बहुत महत्वपूर्ण हैं क्योंकि वे सब कुछ सुचारू रूप से चलते रहते हैं।
बिजली की आपूर्ति - हमें लोड विनिर्देशों के अनुसार, Arduino और IR2110 ICS के लिए +12V और +5V और IR2110 ICS और MOSFETs के लिए एक उच्च DC वोल्टेज की आवश्यकता है।
सर्किट में क्या हो रहा है?
अब हम देखते हैं कि यह कदम से कदम कैसे काम करता है:
Arduino दो आउटपुट पिन (पिन 8 और पिन 9) पर SPWM सिग्नल उत्पन्न करता है। ये सिग्नल एक एसी साइन वेव के बराबर एक आकार बनाने के लिए चौड़ाई को बदलते रहते हैं।
IR2110 ICs इन PWM सिग्नल को प्राप्त करते हैं और बहुत विशिष्ट तरीके से MOSFETs को चालू और बंद करने के लिए उनका उपयोग करते हैं।
चार MOSFETS का उपयोग करके बनाया गया H-Bridge SPWM स्विचिंग का उपयोग करके लोड के माध्यम से वर्तमान दिशा को स्विच करके डीसी बस की आपूर्ति को एसी जैसे आउटपुट में परिवर्तित करता है।
आउटपुट में हमें एक साइन वेव सन्निकटन मिलता है, जिसका अर्थ है कि यह एक साइन वेव की तरह दिखता है, लेकिन वास्तव में तेजी से स्विचिंग दालों से बना है।
यदि हम आउटपुट पर एक फ़िल्टर सर्किट जोड़ते हैं तो हम इन दालों को चिकना कर सकते हैं और अधिक सही साइन वेव प्राप्त कर सकते हैं।
साइन वेव pwm के लिए हमारा Arduino कोड
तो अब हम कोड देखते हैं। यह वही है जो Arduino SPWM सिग्नल उत्पन्न करने के लिए चलाएगा।
835EA94849999CA2B1A94FC3D1BB3E885B51FF2262इस कोड में क्या चल रहा है?
पहले हमने दो आउटपुट पिन (पिन 8 और पिन 9) सेट किए। ये हमारे PWM सिग्नल भेजेंगे।
फिर लूप में हम एक विशेष पैटर्न में पिन को चालू और बंद कर देते हैं।
हम संकीर्ण दालों के साथ शुरू करते हैं और धीरे -धीरे पल्स की चौड़ाई बढ़ाते हैं और फिर हम इसे वापस कम कर देते हैं। यह एक कदम साइन वेव PWM पैटर्न बनाता है।
पहली छमाही चक्र होने के बाद हम अगले चक्र के लिए दूसरे पिन (पिन 9) पर एक ही चीज़ को दोहराते हैं।
इस तरह हमारा एच-ब्रिज फैशन की तरह एक उचित साइनसोइडल लहर में MOSFETS को स्विच करता है।
इस डिजाइन के बारे में क्या अच्छा है
डिजाइन वास्तव में बहुत सरल है। हम सिर्फ एक Arduino और कुछ सामान्य घटकों का उपयोग कर रहे हैं।
हमें यहां एक साइन वेव जनरेटर की आवश्यकता नहीं है, ठीक है। Arduino स्वयं SPWM का उपयोग करके साइन आकार बना रहा है।
एच-ब्रिज IR2110 ICS का उपयोग करके कुशलता से काम करता है ताकि यह सुनिश्चित हो सके कि MOSFETs बिना ओवरहीटिंग के सही तरीके से स्विच करें।
हम SPWM को आसानी से ट्यून कर सकते हैं, यदि हम एक अलग साइन वेव आवृत्ति चाहते हैं, तो हम कोड को थोड़ा संशोधित करते हैं।
हमें Arduino बूटिंग देरी को कैसे संभालना चाहिए
अब एक बहुत ही महत्वपूर्ण बात जो हमें समझनी चाहिए, वह यह है कि Arduino को बिजली पर स्विच करने के बाद शुरू होने में कुछ समय लगता है।
ऐसा इसलिए होता है क्योंकि जब हम Arduino पर पावर करते हैं तो यह पहले अपने आंतरिक बूटलोडर को चलाता है जिसमें कुछ सेकंड लगते हैं।
इसलिए इस समय के दौरान IR2110 गेट ड्राइवर ICS और MOSFETS को Arduino से कोई उचित संकेत नहीं मिल सकता है।
यदि ऐसा होता है तो MOSFETS बेतरतीब ढंग से चालू हो सकता है जो IC को तुरंत नुकसान पहुंचा सकता है, या शॉर्ट सर्किट या विस्फोट का कारण बन सकता है।
यह सुनिश्चित करने के लिए कि उपरोक्त बूटिंग देरी प्रारंभिक शक्ति के दौरान ICS और MOSFETs को नहीं जलाता है, हमें उपरोक्त कोड को संशोधित करने की आवश्यकता है जैसा कि नीचे दिखाया गया है:
// By Swagatam - Full Bridge Sine Wave Inverter Code with Delay
void setup() {
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
delay(3000); // Booting delay (wait for 3 seconds before starting)
}
void loop() {
// First pin (8) switching pattern
digitalWrite(8, HIGH);
delayMicroseconds(500);
digitalWrite(8, LOW);
delayMicroseconds(500);
digitalWrite(8, HIGH);
delayMicroseconds(750);
digitalWrite(8, LOW);
delayMicroseconds(500);
digitalWrite(8, HIGH);
delayMicroseconds(1250);
digitalWrite(8, LOW);
delayMicroseconds(500);
digitalWrite(8, HIGH);
delayMicroseconds(2000);
digitalWrite(8, LOW);
delayMicroseconds(500);
digitalWrite(8, HIGH);
delayMicroseconds(1250);
digitalWrite(8, LOW);
delayMicroseconds(500);
digitalWrite(8, HIGH);
delayMicroseconds(750);
digitalWrite(8, LOW);
delayMicroseconds(500);
digitalWrite(8, HIGH);
delayMicroseconds(500);
digitalWrite(8, LOW);
// Second pin (9) switching pattern
digitalWrite(9, HIGH);
delayMicroseconds(500);
digitalWrite(9, LOW);
delayMicroseconds(500);
digitalWrite(9, HIGH);
delayMicroseconds(750);
digitalWrite(9, LOW);
delayMicroseconds(500);
digitalWrite(9, HIGH);
delayMicroseconds(1250);
digitalWrite(9, LOW);
delayMicroseconds(500);
digitalWrite(9, HIGH);
delayMicroseconds(2000);
digitalWrite(9, LOW);
delayMicroseconds(500);
digitalWrite(9, HIGH);
delayMicroseconds(1250);
digitalWrite(9, LOW);
delayMicroseconds(500);
digitalWrite(9, HIGH);
delayMicroseconds(750);
digitalWrite(9, LOW);
delayMicroseconds(500);
digitalWrite(9, HIGH);
delayMicroseconds(500);
digitalWrite(9, LOW);
}
हिस्सों की सूची
| अर्डुइनो बोर्ड | Arduino Uno (या कोई संगत बोर्ड) | 1 |
| MOSFET ड्राइवर आईसी | IR2110 हाई और लो साइड ड्राइवर | 2 |
| मोसफेट्स | IRF3205 (या इसी तरह का एन-चैनल) | 4 |
| डायोड | 1N4007 (बूटस्ट्रैप और सुरक्षा के लिए) | 4 |
| प्रतिरोधों | 1k and 1/4W (MOSFET गेट पुल-डाउन) | 4 |
| प्रतिरोधों | 150 A 1/4W (MOSFET गेट सीरीज़ रोकनेवाला) | 4 |
| संधारित्र | 100NF (बूटस्ट्रैप कैपेसिटर) | 2 |
| संधारित्र | 22UF 25V (बिजली की आपूर्ति फिल्टर) | 2 |
| भार | कोई भी प्रतिरोधक या प्रेरक भार | 1 |
| बिजली की आपूर्ति | +12V डीसी (MOSFETS के लिए) और +5V DC (Arduino के लिए) | 1 |
| तार और कनेक्टर | सर्किट कनेक्शन के लिए उपयुक्त | जरुरत के अनुसार |
निर्माण युक्तियाँ
अब जब हम वास्तव में इस चीज़ का निर्माण करते हैं तो हमें कुछ महत्वपूर्ण चीजों के बारे में बहुत सावधान रहना होगा। अन्यथा यह काम नहीं कर सकता है या इससे भी बदतर, कुछ सही हो सकता है? तो यहाँ कुछ सुपर महत्वपूर्ण निर्माण युक्तियाँ हैं जिनका हमें पालन करना चाहिए:
हमें बोर्ड पर भागों की व्यवस्था कैसे करनी चाहिए
यदि हम एक ब्रेडबोर्ड का उपयोग करते हैं तो यह सर्किट अच्छी तरह से काम नहीं कर सकता है क्योंकि उच्च शक्ति वाले MOSFET और ड्राइवरों को मजबूत, ठोस कनेक्शन की आवश्यकता होती है।
इसलिए हमें एक पीसीबी (प्रिंटेड सर्किट बोर्ड) या कम से कम एक परफेक्ट बोर्ड का उपयोग करना चाहिए और भागों को ठीक से मिलाप करना चाहिए।
यदि हम एक पीसीबी बनाते हैं तो हमें MOSFETS और IR2110 IC को एक साथ बंद रखना चाहिए ताकि सिग्नल कमजोर या देरी न हो।
मोटी तारों को उच्च वर्तमान रास्तों के लिए जाना चाहिए जैसे बिजली की आपूर्ति से लेकर MOSFETS तक और MOSFETS से लोड तक।
पतली तारों का उपयोग केवल सिग्नल कनेक्शन के लिए किया जा सकता है जैसे कि Arduino से IR2110 ICS तक।
हमें MOSFETS कैसे रखना चाहिए
चार MOSFETS को एक उचित एच-ब्रिज आकार में रखा जाना चाहिए ताकि वायरिंग गड़बड़ न हो।
प्रत्येक MOSFET में IR2110 IC के लिए छोटे और मोटे कनेक्शन होने चाहिए।
यदि हम MOSFETS को IR2110 से बहुत दूर रखते हैं तो सिग्नल कमजोर हो सकते हैं और MOSFETS ठीक से स्विच नहीं कर सकता है।
अगर ऐसा होता है तो MOSFETS गर्म हो सकता है और यहां तक कि बाहर जल सकता है।
हमें गर्मी के मुद्दे को कैसे ठीक करना चाहिए
यदि हम IRF3205 MOSFETS या इसी तरह का उपयोग करते हैं, तो वे गर्म हो जाएंगे यदि हम उन्हें हीटसिंक नहीं देते हैं।
इसलिए हमें उन्हें ठंडा रखने के लिए MOSFETS के लिए एक बड़े एल्यूमीनियम हीटसिंक को ठीक करना चाहिए।
यदि हम एक उच्च-शक्ति इन्वर्टर (100W से अधिक) बना रहे हैं, तो हमें हीटसिंक पर एक शीतलन प्रशंसक भी संलग्न करना चाहिए।
यदि MOSFETs स्पर्श करने के लिए बहुत गर्म हो जाते हैं, तो इसका मतलब है कि कुछ मुद्दा है और हमें फिर से सर्किट की जांच करने की आवश्यकता है।
हमें सर्किट को कैसे शक्ति देना चाहिए
Arduino भाग 5V पर चलता है और MOSFETS को काम करने के लिए 12V या अधिक की आवश्यकता होती है।
इसलिए हमें कभी भी 12V को Arduino से कनेक्ट नहीं करना चाहिए, या यह तुरंत जल जाएगा!
IR2110 IC को दो बिजली की आपूर्ति की आवश्यकता है:
हाई-साइड MOSFETS के लिए 12V
लॉजिक सेक्शन के लिए 5V
यदि हम इन बिजली लाइनों को मिलाते हैं तो सर्किट ठीक से काम नहीं करेगा और MOSFETS सही तरीके से स्विच नहीं करेंगे।
हमें तारों को कैसे जोड़ना चाहिए
ग्राउंड (GND) कनेक्शन सुपर महत्वपूर्ण है। यदि ग्राउंड वायरिंग कमजोर या लंबी है, तो सर्किट अजीब तरह से व्यवहार कर सकता है।
हमें सभी भागों के लिए एक सामान्य जमीन का उपयोग करना चाहिए, जिसका अर्थ है कि Arduino जमीन, IR2110 ग्राउंड और MOSFET स्रोत ग्राउंड को एक साथ जोड़ा जाना चाहिए।
यदि हम सर्किट को अजीब तरह से व्यवहार करते हुए देखते हैं (जैसे आउटपुट टिमटिमाते हुए या मोसफेट्स बिना लोड के गर्म हो रहे हैं), तो हमें पहले जमीन कनेक्शन की जांच करनी चाहिए।
हमें इसे बिजली देने से पहले सर्किट की जांच करनी चाहिए
इससे पहले कि हम शक्ति पर स्विच करें हमें यह देखने के लिए सभी कनेक्शनों को दोबारा जांच करनी चाहिए कि क्या सब कुछ सही है।
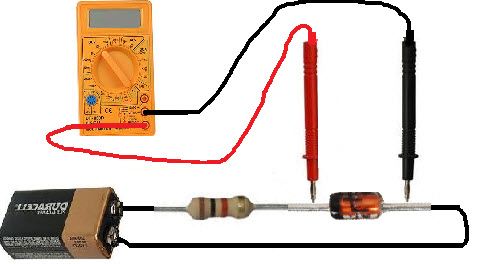
यदि हमारे पास एक मल्टीमीटर है, तो हमें MOSFETS डालने से पहले अलग -अलग बिंदुओं पर वोल्टेज की जांच करने के लिए इसका उपयोग करना चाहिए।
हमें कड़ाई से एक आस्टसीलस्कप की आवश्यकता होगी ताकि हम Arduino से आने वाले SPWM संकेतों की जांच कर सकें कि क्या वे सही दिखते हैं।
हमें सर्किट का सावधानी से परीक्षण कैसे करना चाहिए
इस सर्किट को सुरक्षित रूप से परीक्षण करने का सबसे अच्छा तरीका एक कम वोल्टेज के साथ शुरू करना है।
12V के बजाय हम पहले 6V या 9V के साथ यह देखने के लिए प्रयास कर सकते हैं कि क्या MOSFETS सही तरीके से स्विच कर रहे हैं।
यदि सर्किट कम वोल्टेज पर अच्छी तरह से काम करता है तो हम धीरे -धीरे 12V और अंत में पूर्ण वोल्टेज तक बढ़ सकते हैं।
अगर हम अचानक पूर्ण वोल्टेज लागू करते हैं और कुछ गलत है तो कुछ तुरंत जल सकता है!
इसलिए हमें कदम से कदम का परीक्षण करना चाहिए और ओवरहीटिंग या गलत व्यवहार के लिए जाँच जारी रखनी चाहिए।
हम एक चिकनी आउटपुट के लिए एक फ़िल्टर कैसे जोड़ सकते हैं
यह सर्किट पीडब्लूएम का उपयोग करके एक एसी आउटपुट बनाता है लेकिन यह अभी भी तेज दालों से बना है।
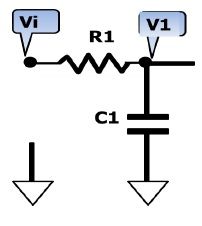
यदि हम एक साफ साइन वेव चाहते हैं तो हमें आउटपुट पर एक एलसी फ़िल्टर जोड़ना होगा।
यह एलसी फ़िल्टर सिर्फ एक बड़ा प्रारंभ करनेवाला और आउटपुट से जुड़ा एक संधारित्र है।
प्रारंभ करनेवाला तेजी से स्विचिंग दालों को हटा देता है और संधारित्र तरंग को चिकना करता है।
यदि हम इसे ठीक से करते हैं तो हम एक शुद्ध साइन लहर प्राप्त कर सकते हैं जो उपकरणों के लिए सुरक्षित है।
हमें सर्किट को नुकसान से कैसे बचाना चाहिए
हमें हमेशा बिजली की आपूर्ति के साथ श्रृंखला में एक फ्यूज जोड़ना चाहिए।
यदि कुछ शॉर्ट्स या MOSFET विफल हो जाता है तो फ्यूज पहले टूट जाएगा और सर्किट को जलने से बचाएगा।
यदि MOSFETS विफल हो जाता है, तो कभी -कभी वे शॉर्ट होते हैं (जिसका अर्थ है कि वे हमेशा रहते हैं)।
यदि ऐसा होता है तो विशाल करंट ट्रांसफॉर्मर या अन्य भागों को प्रवाह और नुकसान पहुंचा सकता है।
इसलिए उच्च शक्ति लागू करने से पहले एक मल्टीमीटर का उपयोग करके MOSFETs की जांच करना हमेशा अच्छा होता है।
निष्कर्ष
तो यहाँ हमने देखा कि कैसे हम सिर्फ Arduino और एक H-Bridge Mosfet सर्किट का उपयोग करके एक साइन वेव इन्वर्टर बना सकते हैं। हमने अपने साइन-मॉड्यूलेटेड एसी को उत्पन्न करने के लिए Arduino से MOSFETS और PWM नियंत्रण को ठीक से स्विच करने के लिए IR2110 MOSFET ड्राइवरों का उपयोग किया।
अब याद रखने वाली एक बात यह है कि यह आउटपुट अभी भी तेजी से स्विचिंग दालों से बना है, इसलिए अगर हमें शुद्ध साइन वेव की आवश्यकता है तो हमें इसे चिकना करने के लिए आउटपुट पर एक एलसी फिल्टर जोड़ना होगा।
लेकिन कुल मिलाकर यह घर पर एक साइन वेव इन्वर्टर बनाने के लिए एक बहुत ही व्यावहारिक और आसान तरीका है!